PX4-Autopilot: Bug of HITL simulation
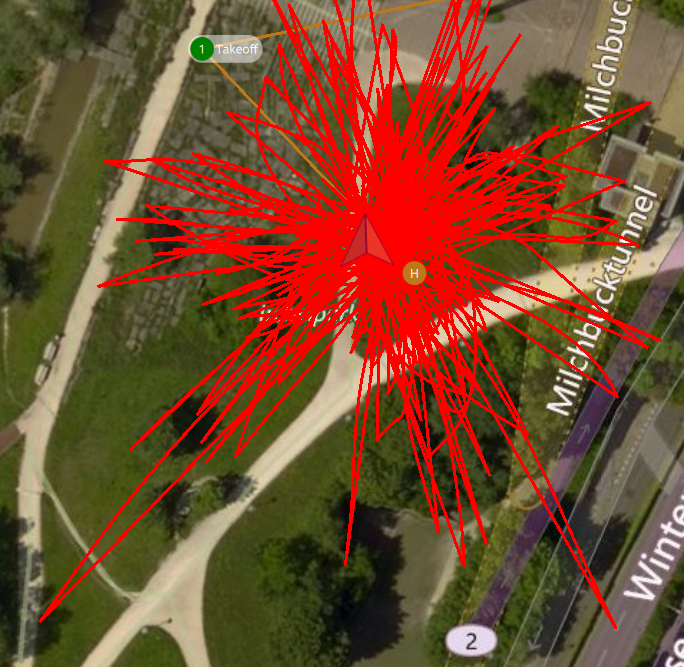
I have test HILT simulation with gazebo.I have done following Dev setup.But I run “gazebo Tools/sitl_gazebo/worlds/iris.world” after connected the flight controller.This is the issues in followwing picture.
 Then I test jmavsim.I run
Then I test jmavsim.I run "./Tools/jmavsim_run.sh -q -d /dev/ttyACM0 -b 921600 -r " and connect flight controller and QGC.When armed,it messy fly and doesn’t fly according to the mission in QGC.But it has not moved in jmavsim.
[15:49:11.649] Critical: Takeoff denied, disarm and re-try
[15:49:31.652] Critical: REJECT AUTO HOLD
[15:49:37.713] Info: [logger] file: /fs/microsd/log/2018-11-07/07_49_3
[15:49:37.915] Info: Takeoff detected
[15:49:37.916] EMERGENCY: CRITICAL NAVIGATION FAILURE - CHECK SENSOR CALIBR
[15:49:39.945] Info: Landing detected
[15:49:41.554] Info: Takeoff detected
[15:49:46.096] Critical: Failsafe enabled: no global position
[15:49:46.097] Info: Failsafe mode enabled
[15:49:46.097] Info: Executing Mission
[15:49:46.097] Info: Takeoff to 50.0 meters above home.
[15:49:47.495] Info: Failsafe mode disabled
[15:49:47.495] Info: Takeoff to 50.0 meters above home.
[15:49:47.495] Critical: Failsafe enabled: no global position
[15:49:47.496] Info: Failsafe mode enabled
[15:49:48.883] Info: Failsafe mode disabled
[15:49:48.884] Info: Takeoff to 50.0 meters above home.
[15:49:48.884] Critical: Failsafe enabled: no global position
[15:49:48.884] Info: Failsafe mode enabled
[16:19:40.637] Critical: MANUAL CONTROL LOST (at t=2012522ms)
[16:19:46.077] Info: MANUAL CONTROL REGAINED after 5872ms
[16:19:54.773] Critical: MANUAL CONTROL LOST (at t=2026626ms)
[16:19:58.796] Info: MANUAL CONTROL REGAINED after 4449ms
[16:20:19.826] Critical: NOT DISARMING: Not in manual mode or landed yet.
[16:20:21.241] Critical: NOT DISARMING: Not in manual mode or landed yet.
[16:20:22.651] Critical: NOT DISARMING: Not in manual mode or landed yet.
[16:20:23.854] Critical: NOT DISARMING: Not in manual mode or landed yet.
[16:20:27.096] Critical: NOT DISARMING: Not in manual mode or landed yet.
[16:20:28.905] Critical: REJECT AUTO HOLD
[16:20:29.115] Info: Failsafe mode disabled
[16:21:05.290] Info: Takeoff to 50.0 meters above home.
[16:21:05.292] Critical: Failsafe enabled: no global position
[16:21:05.293] Info: Failsafe mode enabled
[16:21:08.123] Info: Failsafe mode disabled
[16:21:08.123] Critical: Failsafe enabled: no global position
[16:21:08.124] Info: Failsafe mode enabled
[16:21:08.124] Info: Takeoff to 50.0 meters above home.
[16:21:28.927] Critical: MANUAL CONTROL LOST (at t=2120797ms)
[16:41:23.872] Critical: Set SYS_HITL to 0 and reboot to disable HITL.
[16:41:24.265] Info: data link #0 lost
[16:41:24.336] Critical: ALL DATA LINKS LOST
[16:41:24.436] Info: data link #0 regained`
this is log in QGC
About this issue
- Original URL
- State: closed
- Created 6 years ago
- Comments: 21 (10 by maintainers)
I have queried the same problem in https://github.com/PX4/Firmware/issues and http://discuss.px4.io/. Someone test v2 to HITL is failed,but pixhawk 4 is successful use v1.7.0.And v2 and ppixhawk 4 are failed used v1.8.0 http://discuss.px4.io/t/hitl-simulation/6638/9
Edit by @julianoes: fixed your link