moveit2: Hybrid Planner: Cannot find planning configuration for 'arm'
Description
I added the hybrid planner node-launch-section to the move_group.launch.py from the panda_moveit_config.
My launch file:
Toggle for my launch file
#!/usr/bin/env -S ros2 launch
"""Configure and setup move group for planning with MoveIt 2"""
from os import path
from typing import List
import yaml
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.conditions import IfCondition
from launch.substitutions import (
Command,
FindExecutable,
LaunchConfiguration,
PathJoinSubstitution,
PythonExpression,
)
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
from launch_ros.descriptions import ComposableNode
from launch_ros.actions import ComposableNodeContainer
def generate_launch_description():
# Declare all launch arguments
declared_arguments = generate_declared_arguments()
# Get substitution for all arguments
description_package = LaunchConfiguration("description_package")
description_filepath = LaunchConfiguration("description_filepath")
moveit_config_package = "panda_moveit_config"
name = LaunchConfiguration("name")
prefix = LaunchConfiguration("prefix")
gripper = LaunchConfiguration("gripper")
collision_arm = LaunchConfiguration("collision_arm")
collision_gripper = LaunchConfiguration("collision_gripper")
safety_limits = LaunchConfiguration("safety_limits")
safety_position_margin = LaunchConfiguration("safety_position_margin")
safety_k_position = LaunchConfiguration("safety_k_position")
safety_k_velocity = LaunchConfiguration("safety_k_velocity")
ros2_control = LaunchConfiguration("ros2_control")
ros2_control_plugin = LaunchConfiguration("ros2_control_plugin")
ros2_control_command_interface = LaunchConfiguration(
"ros2_control_command_interface"
)
gazebo_preserve_fixed_joint = LaunchConfiguration(
"gazebo_preserve_fixed_joint")
enable_servo = LaunchConfiguration("enable_servo")
enable_rviz = LaunchConfiguration("enable_rviz")
rviz_config = LaunchConfiguration("rviz_config")
use_sim_time = LaunchConfiguration("use_sim_time")
log_level = LaunchConfiguration("log_level")
# URDF
_robot_description_xml = Command(
[
PathJoinSubstitution([FindExecutable(name="xacro")]),
" ",
PathJoinSubstitution(
[FindPackageShare(description_package), description_filepath]
),
" ",
"name:=",
name,
" ",
"prefix:=",
prefix,
" ",
"gripper:=",
gripper,
" ",
"collision_arm:=",
collision_arm,
" ",
"collision_gripper:=",
collision_gripper,
" ",
"safety_limits:=",
safety_limits,
" ",
"safety_position_margin:=",
safety_position_margin,
" ",
"safety_k_position:=",
safety_k_position,
" ",
"safety_k_velocity:=",
safety_k_velocity,
" ",
"ros2_control:=",
ros2_control,
" ",
"ros2_control_plugin:=",
ros2_control_plugin,
" ",
"ros2_control_command_interface:=",
ros2_control_command_interface,
" ",
"gazebo_preserve_fixed_joint:=",
gazebo_preserve_fixed_joint,
]
)
robot_description = {"robot_description": _robot_description_xml}
# SRDF
_robot_description_semantic_xml = Command(
[
PathJoinSubstitution([FindExecutable(name="xacro")]),
" ",
PathJoinSubstitution(
[
FindPackageShare(moveit_config_package),
"srdf",
"panda.srdf.xacro",
]
),
" ",
"name:=",
name,
" ",
"prefix:=",
prefix,
]
)
robot_description_semantic = {
"robot_description_semantic": _robot_description_semantic_xml
}
# Kinematics
kinematics = load_yaml(
moveit_config_package, path.join("config", "kinematics.yaml")
)
# Joint limits
joint_limits = {
"robot_description_planning": load_yaml(
moveit_config_package, path.join("config", "joint_limits.yaml")
)
}
# Servo
servo_params = {
"moveit_servo": load_yaml(
moveit_config_package, path.join("config", "servo.yaml")
)
}
servo_params["moveit_servo"].update({"use_gazebo": use_sim_time})
# Planning pipeline
planning_pipeline = {
"planning_pipelines": ["ompl"],
"default_planning_pipeline": "ompl",
"ompl": {
"planning_plugin": "ompl_interface/OMPLPlanner",
# TODO: Re-enable `default_planner_request_adapters/AddRuckigTrajectorySmoothing` once its issues are resolved
# "request_adapters": "default_planner_request_adapters/AddTimeOptimalParameterization default_planner_request_adapters/ResolveConstraintFrames default_planner_request_adapters/FixWorkspaceBounds default_planner_request_adapters/FixStartStateBounds default_planner_request_adapters/FixStartStateCollision default_planner_request_adapters/FixStartStatePathConstraints",
"request_adapters": "default_planner_request_adapters/AddTimeOptimalParameterization default_planner_request_adapters/ResolveConstraintFrames default_planner_request_adapters/FixWorkspaceBounds default_planner_request_adapters/FixStartStateBounds default_planner_request_adapters/FixStartStateCollision default_planner_request_adapters/FixStartStatePathConstraints default_planner_request_adapters/SetMaxCartesianEndEffectorSpeed",
# TODO: Reduce start_state_max_bounds_error once spawning with specific joint configuration is enabled
"start_state_max_bounds_error": 0.31416,
},
}
_ompl_yaml = load_yaml(
moveit_config_package, path.join("config", "ompl_planning.yaml")
)
planning_pipeline["ompl"].update(_ompl_yaml)
# Planning scene
planning_scene_monitor_parameters = {
"publish_planning_scene": True,
"publish_geometry_updates": True,
"publish_state_updates": True,
"publish_transforms_updates": True,
}
# MoveIt controller manager
moveit_controller_manager_yaml = load_yaml(
moveit_config_package, path.join(
"config", "moveit_controller_manager.yaml")
)
moveit_controller_manager = {
"moveit_controller_manager": "moveit_simple_controller_manager/MoveItSimpleControllerManager",
"moveit_simple_controller_manager": moveit_controller_manager_yaml,
}
# Trajectory execution
trajectory_execution = {
"allow_trajectory_execution": True,
"moveit_manage_controllers": False,
"trajectory_execution.allowed_execution_duration_scaling": 1.2,
"trajectory_execution.allowed_goal_duration_margin": 0.5,
"trajectory_execution.allowed_start_tolerance": 0.01,
}
# Controller parameters
declared_arguments.append(
DeclareLaunchArgument(
"__controller_parameters_basename",
default_value=["controllers_",
ros2_control_command_interface, ".yaml"],
)
)
controller_parameters = PathJoinSubstitution(
[
FindPackageShare(moveit_config_package),
"config",
LaunchConfiguration("__controller_parameters_basename"),
]
)
# List of nodes to be launched
nodes = [
# robot_state_publisher
Node(
package="robot_state_publisher",
executable="robot_state_publisher",
output="log",
arguments=["--ros-args", "--log-level", log_level],
parameters=[
robot_description,
{
"publish_frequency": 50.0,
"frame_prefix": "",
"use_sim_time": use_sim_time,
},
],
),
# ros2_control_node (only for fake controller)
Node(
package="controller_manager",
executable="ros2_control_node",
output="log",
arguments=["--ros-args", "--log-level", log_level],
parameters=[
robot_description,
controller_parameters,
{"use_sim_time": use_sim_time},
],
condition=(
IfCondition(
PythonExpression(
[
"'",
ros2_control_plugin,
"'",
" == ",
"'fake'",
]
)
)
),
),
# move_group (with execution)
Node(
package="moveit_ros_move_group",
executable="move_group",
output="log",
# arguments=["--ros-args", "--log-level", log_level],
arguments=["--ros-args", "--log-level", 'info'],
parameters=[
robot_description,
robot_description_semantic,
kinematics,
joint_limits,
planning_pipeline,
trajectory_execution,
planning_scene_monitor_parameters,
moveit_controller_manager,
{"use_sim_time": use_sim_time},
],
),
# move_servo
Node(
package="moveit_servo",
executable="servo_node_main",
output="log",
arguments=["--ros-args", "--log-level", log_level],
parameters=[
robot_description,
robot_description_semantic,
kinematics,
joint_limits,
planning_pipeline,
trajectory_execution,
planning_scene_monitor_parameters,
servo_params,
{"use_sim_time": use_sim_time},
],
condition=IfCondition(enable_servo),
),
# rviz2
Node(
package="rviz2",
executable="rviz2",
output="log",
arguments=[
"--display-config",
rviz_config,
"--ros-args",
"--log-level",
log_level,
],
parameters=[
robot_description,
robot_description_semantic,
kinematics,
planning_pipeline,
joint_limits,
{"use_sim_time": use_sim_time},
],
condition=IfCondition(enable_rviz),
),
]
# Add nodes for loading controllers
for controller in moveit_controller_manager_yaml["controller_names"] + [
"joint_state_broadcaster"
]:
nodes.append(
# controller_manager_spawner
Node(
package="controller_manager",
executable="spawner",
output="log",
arguments=[controller, "--ros-args", "--log-level", log_level],
parameters=[{"use_sim_time": use_sim_time}],
),
)
# Any parameters that are unique to your plugins go here
common_hybrid_planning_param = load_yaml(
moveit_config_package, path.join("config", "common_hybrid_planning_params.yaml")
)
global_planner_param = load_yaml(
moveit_config_package, path.join("config", "global_planner.yaml")
)
local_planner_param = load_yaml(
moveit_config_package, path.join("config", "local_planner.yaml")
)
hybrid_planning_manager_param = load_yaml(
moveit_config_package, path.join("config", "hybrid_planning_manager.yaml")
)
# Generate launch description with multiple components
container = ComposableNodeContainer(
name="hybrid_planning_container",
namespace="/",
package="rclcpp_components",
executable="component_container",
composable_node_descriptions=[
ComposableNode(
package="moveit_hybrid_planning",
# plugin="moveit_hybrid_planning::GlobalPlannerComponent",
plugin="moveit::hybrid_planning::GlobalPlannerComponent",
name="global_planner",
parameters=[
common_hybrid_planning_param,
global_planner_param,
robot_description,
robot_description_semantic,
kinematics,
planning_pipeline,
{"use_sim_time": use_sim_time},
],
),
ComposableNode(
package="moveit_hybrid_planning",
# plugin="moveit_hybrid_planning::LocalPlannerComponent",
plugin="moveit::hybrid_planning::LocalPlannerComponent",
name="local_planner",
parameters=[
common_hybrid_planning_param,
local_planner_param,
robot_description,
robot_description_semantic,
kinematics,
{"use_sim_time": use_sim_time},
],
),
ComposableNode(
package="moveit_hybrid_planning",
# plugin="moveit_hybrid_planning::HybridPlanningManager",
plugin="moveit::hybrid_planning::HybridPlanningManager",
name="hybrid_planning_manager",
parameters=[
common_hybrid_planning_param,
hybrid_planning_manager_param,
{"use_sim_time": use_sim_time},
],
),
],
output="screen",
)
return LaunchDescription(declared_arguments +[container]+ nodes)
def load_yaml(package_name: str, file_path: str):
"""
Load yaml configuration based on package name and file path relative to its share.
"""
package_path = get_package_share_directory(package_name)
absolute_file_path = path.join(package_path, file_path)
return parse_yaml(absolute_file_path)
def parse_yaml(absolute_file_path: str):
"""
Parse yaml from file, given its absolute file path.
"""
try:
with open(absolute_file_path, "r") as file:
return yaml.safe_load(file)
except EnvironmentError:
return None
def generate_declared_arguments() -> List[DeclareLaunchArgument]:
"""
Generate list of all launch arguments that are declared for this launch script.
"""
return [
# Locations of robot resources
DeclareLaunchArgument(
"description_package",
default_value="panda_description",
description="Custom package with robot description.",
),
DeclareLaunchArgument(
"description_filepath",
default_value=path.join("urdf", "panda.urdf.xacro"),
description="Path to xacro or URDF description of the robot, relative to share of `description_package`.",
),
# Naming of the robot
DeclareLaunchArgument(
"name",
default_value="panda",
description="Name of the robot.",
),
DeclareLaunchArgument(
"prefix",
default_value="panda_",
description="Prefix for all robot entities. If modified, then joint names in the configuration of controllers must also be updated.",
),
# Gripper
DeclareLaunchArgument(
"gripper",
default_value="true",
description="Flag to enable default gripper.",
),
# Collision geometry
DeclareLaunchArgument(
"collision_arm",
default_value="true",
description="Flag to enable collision geometry for manipulator's arm.",
),
DeclareLaunchArgument(
"collision_gripper",
default_value="true",
description="Flag to enable collision geometry for manipulator's gripper (hand and fingers).",
),
# Safety controller
DeclareLaunchArgument(
"safety_limits",
default_value="true",
description="Flag to enable safety limits controllers on manipulator joints.",
),
DeclareLaunchArgument(
"safety_position_margin",
default_value="0.15",
description="Lower and upper margin for position limits of all safety controllers.",
),
DeclareLaunchArgument(
"safety_k_position",
default_value="100.0",
description="Parametric k-position factor of all safety controllers.",
),
DeclareLaunchArgument(
"safety_k_velocity",
default_value="40.0",
description="Parametric k-velocity factor of all safety controllers.",
),
# ROS 2 control
DeclareLaunchArgument(
"ros2_control",
default_value="true",
description="Flag to enable ros2 controllers for manipulator.",
),
DeclareLaunchArgument(
"ros2_control_plugin",
default_value="ign",
description="The ros2_control plugin that should be loaded for the manipulator ('fake', 'ign', 'real' or custom).",
),
DeclareLaunchArgument(
"ros2_control_command_interface",
default_value="effort",
description="The output control command interface provided by ros2_control ('position', 'velocity', 'effort' or certain combinations 'position,velocity').",
),
# Gazebo
DeclareLaunchArgument(
"gazebo_preserve_fixed_joint",
default_value="false",
description="Flag to preserve fixed joints and prevent lumping when generating SDF for Gazebo.",
),
# Servo
DeclareLaunchArgument(
"enable_servo",
default_value="true",
description="Flag to enable MoveIt2 Servo for manipulator.",
),
# Miscellaneous
DeclareLaunchArgument(
"enable_rviz", default_value="true", description="Flag to enable RViz2."
),
DeclareLaunchArgument(
"rviz_config",
default_value=path.join(
get_package_share_directory("panda_moveit_config"),
"rviz",
"moveit.rviz",
),
description="Path to configuration for RViz2.",
),
DeclareLaunchArgument(
"use_sim_time",
default_value="false",
description="If true, use simulated clock.",
),
DeclareLaunchArgument(
"log_level",
default_value="warn",
description="The level of logging that is applied to all ROS 2 nodes launched by this script.",
),
]
When I start the launchfile everything seems to load and initialize fine. When I send a ROS2 action goal to the hybrid planner action, the following error message appears.
Error:
[component_container-5] [INFO] [1661361852.374916593] [hybrid_planning_manager]: Received goal request
[component_container-5] [INFO] [1661361852.375354694] [global_planner_component]: Received global planning goal request
[component_container-5] [WARN] [1661361852.375687994] [moveit.ompl_planning.planning_context_manager]: Cannot find planning configuration for group 'arm' using planner 'ompl'. Will use defaults instead.
[component_container-5] [WARN] [1661361852.376159995] [moveit.ompl_planning.model_based_planning_context]: It looks like the planning volume was not specified.
[component_container-5] [INFO] [1661361852.376769996] [moveit.ompl_planning.model_based_planning_context]: Planner configuration 'arm' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed.
[component_container-5] [INFO] [1661361852.423259971] [moveit.ros_planning_interface.planning_component]: Deleting PlanningComponent 'arm'
[component_container-5] [INFO] [1661361852.425688675] [local_planner_component]: Received local planning goal request
[component_container-5] [INFO] [1661361852.436263791] [local_planner_component]: The local planner is solving...
[component_container-5] [INFO] [1661361852.576135215] [local_planner_component]: The local planner has been stuck for several iterations. Aborting.
[component_container-5] [INFO] [1661361852.576445316] [global_planner_component]: Received global planning goal request
[component_container-5] [WARN] [1661361852.576617616] [moveit.ompl_planning.planning_context_manager]: Cannot find planning configuration for group 'arm' using planner 'ompl'. Will use defaults instead.
I tested to send a ROS2 action goal to the hybrid planner action from the hybrid_planner_tutorial and it worked just fine.
ros2 launch moveit_hybrid_planning hybrid_planning_demo.launch.py
local_planner.yaml
robot_description: "robot_description"
trajectory_operator_plugin_name: "moveit_hybrid_planning/SimpleSampler"
local_constraint_solver_plugin_name: "moveit_hybrid_planning/ForwardTrajectory"
local_planning_frequency: 100.0
global_solution_topic: "global_trajectory"
# local_solution_topic: "/panda_joint_group_position_controller/commands" # or panda_arm_controller/joint_trajectory
local_solution_topic: "panda_arm_controller/joint_trajectory"
# local_solution_topic_type: "std_msgs/Float64MultiArray" # or trajectory_msgs/JointTrajectory
local_solution_topic_type: "trajectory_msgs/JointTrajectory"
publish_joint_positions: true
publish_joint_velocities: false
# group_name: "panda_arm"
group_name: "arm"
# Subscribe to this topic
monitored_planning_scene: "/planning_scene"
collision_object_topic: "/collision_object"
joint_states_topic: "/joint_states"
# ForwardTrajectory param
stop_before_collision: true
global_planner.yaml
global_planner_name: "moveit_hybrid_planning/MoveItPlanningPipeline"
# The rest of these parameters are typical for moveit_cpp
planning_scene_monitor_options:
name: "planning_scene_monitor"
robot_description: "robot_description"
joint_state_topic: "/joint_states"
attached_collision_object_topic: "/moveit_cpp/planning_scene_monitor"
# Subscribe to this topic (The name comes from the perspective of moveit_cpp)
publish_planning_scene_topic: "/planning_scene"
# Publish this topic, e.g. to visualize with RViz
monitored_planning_scene_topic: "/global_planner/planning_scene"
wait_for_initial_state_timeout: 10.0
planning_pipelines:
#namespace: "moveit_cpp" # optional, default is ~
pipeline_names: ["ompl"]
plan_request_params:
planning_attempts: 1
planning_pipeline: ompl
max_velocity_scaling_factor: 1.0
max_acceleration_scaling_factor: 1.0
hybrid_planning_manager.yaml
planner_logic_plugin_name: "moveit_hybrid_planning/ReplanInvalidatedTrajectory"
Your environment
- ROS Distro: Galactic
- OS Version: Ubuntu 20.04
- Source or Binary build?
- If binary, which release version? galactic
Steps to reproduce
Tell us how to reproduce this issue. Attempt to provide a working demo, perhaps using Docker.
Expected behaviour
The hybrid planner should process the request like in the tutorial.
Actual behaviour
The robot in RViz stands still and does not move. However, I can see the planned path in RViz as a ghost.
About this issue
- Original URL
- State: closed
- Created 2 years ago
- Comments: 16 (5 by maintainers)
I did not use the hybrid plugin since my C++ understanding is limited and the whole MoveIt architecture is quite complex. I simply spawned 3 python nodes as seen in the illustration above. I manually called the MoveGroup action server to plan a trajectory with the
plan_only = Trueparameter and then sent JointJog messages via thedelta_joint_cmdstopic to match this topic.@sjahr I just finished my master thesis project. It would not have been possible without your hybrid_planning framework contribution. since it got me on the right track. Thank you for that. Here is the final video of my project if you are interested: https://youtu.be/jY5_l84q21U
@sjahr @skaeringur97 Unfortunately I was not able to get it working using the built-in hybrid planner. I somehow modelled my own hybrid framework: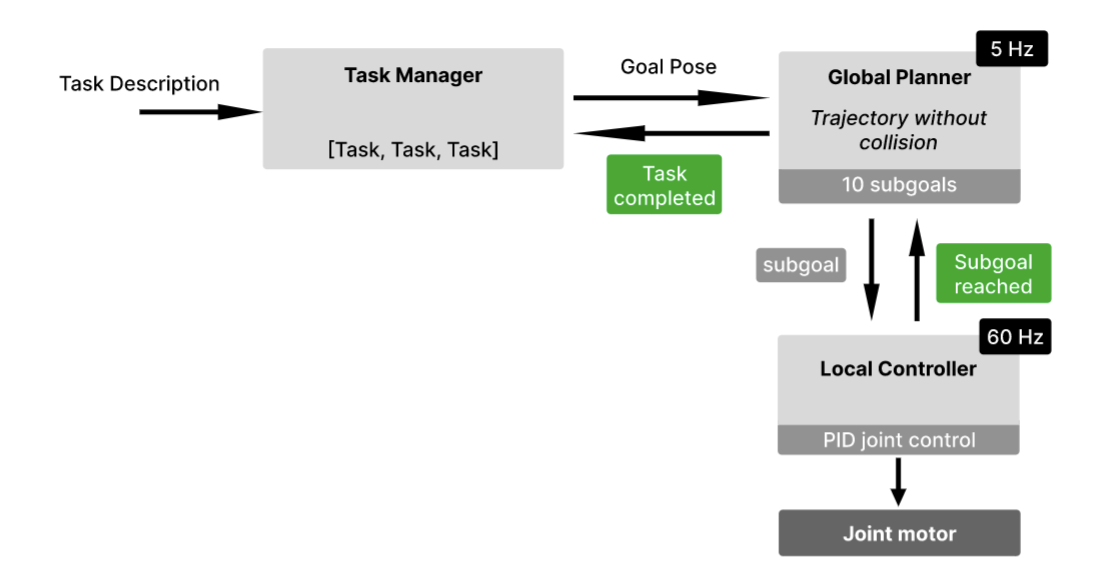
I used JointJog messages to track a certain joint configuration.
Lowering the local planner frequency improved the stuttering:
local_planning_frequency: 50.0