depthai-ros: [bug] {Tf publishers}
Start with the why:
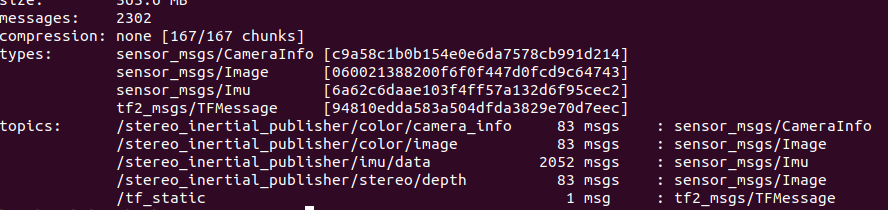
I am recording a ros bag of the different topics i need from the camera to run rtabmap. I am encoutering some issues because theres some tfs missing. When i record i end up with only one message for the tf_static. Is there a way to get tfs. I am not sure if theres an issue or if the ros wrapper is just like that
About this issue
- Original URL
- State: closed
- Created 2 years ago
- Comments: 16 (9 by maintainers)
Maybe you’re on ROS melodic and you have more static TF publishers? If that’s the case and you’re replaying a bag file, it doesn’t work: https://github.com/ros/ros_comm/issues/146 (this issue has been fixed in Noetic). If you’re using Melodic, just install
ros-melodic-static-transform-mux, open a console and runrosrun static_transform_mux static_transform_muxin it. After that, start replaying the bag file. Now you should have all TFs.the issue was fixed with the latest merge in depth-core ai , thanks
It means it will be published in /tf. I will add an option to change. If I understand what rtabmap is trying to do is get and change the replative from map to base of oak.