realsense-ros: [ROS1 & ROS2] xxxxxx_multiple_cameras.urdf.xacro doesn't support different variant cameras
Hi
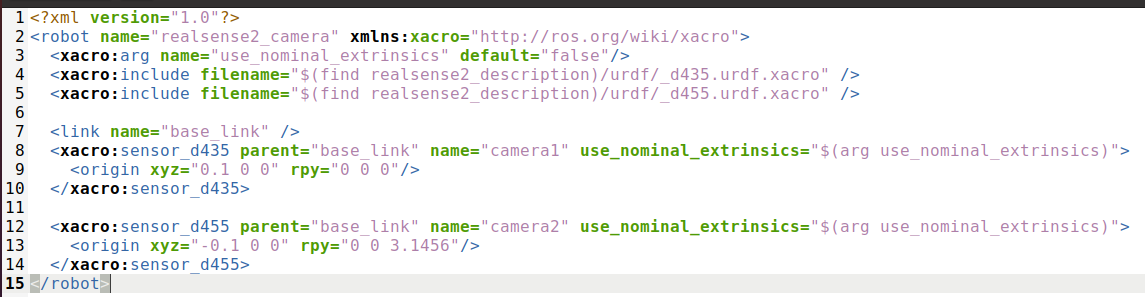
Using test_d435_multiple_cameras.urdf.xacro can properly load d435 cameras. However when adding <xacro:include > any other variant of cameras, it will throw error Error: material 'aluminum' is not unique. Is there any solution for this? Because i wanna build a robot model that using 2 / more different type of cameras.
Best, Samuel
About this issue
- Original URL
- State: closed
- Created 2 years ago
- Comments: 23
Thanks very much, @caranx-medical - I have added an Enhancement tag to this case and re-opened it. This case should be kept open for the durartion that the PR associated with it is active.