Fast-DDS: `ros2 topic info -v` prints wrong data [9293]
This bug report originated from https://github.com/ros2/ros2cli/issues/525.
ros2 topic info -v prints wrong Nodename, Namespace and QoS profile from ros2 daemon,
NOTE: It seems that ros2 daemon with rmw_fastrtps_cpp does not set correct data after receiving data(w) from a node with rmw_cyclonedds_cpp because some message ids are optimized in CycloneDDS that not be sent (such as, PID_DURABILITY is a default value of VOLATILE, PID_PARTICIPANT_GUID is sent in data(p) before )
Expected Behavior
- Node name is
_ros2cli_{pid}, not_CREATED_BY_BARE_DDS_APP_ - Namespace is
/, not_CREATED_BY_BARE_DDS_APP_ - Durability is
RMW_QOS_POLICY_DURABILITY_VOLATILE(run ros2 with durability(volatile) )
such as,
Type: std_msgs/msg/String
Publisher count: 1
Node name: _ros2cli_3789
Node namespace: /
Topic type: std_msgs/msg/String
Endpoint type: PUBLISHER
GID: a2.71.10.01.63.3e.45.12.06.a7.78.19.00.00.08.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RMW_QOS_POLICY_RELIABILITY_BEST_EFFORT
Durability: RMW_QOS_POLICY_DURABILITY_VOLATILE
Lifespan: 9223372036854775807 nanoseconds
Deadline: 9223372036854775807 nanoseconds
Liveliness: RMW_QOS_POLICY_LIVELINESS_AUTOMATIC
Liveliness lease duration: 9223372036854775807 nanoseconds
Subscription count: 0
Current Behavior
Type: std_msgs/msg/String
Publisher count: 1
Node name: _CREATED_BY_BARE_DDS_APP_
Node namespace: _CREATED_BY_BARE_DDS_APP_
Topic type: std_msgs/msg/String
Endpoint type: PUBLISHER
GID: a2.71.10.01.63.3e.45.12.06.a7.78.19.00.00.08.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RMW_QOS_POLICY_RELIABILITY_BEST_EFFORT
Durability: RMW_QOS_POLICY_DURABILITY_TRANSIENT_LOCAL
Lifespan: 2147483651294967295 nanoseconds
Deadline: 2147483651294967295 nanoseconds
Liveliness: RMW_QOS_POLICY_LIVELINESS_AUTOMATIC
Liveliness lease duration: 2147483651294967295 nanoseconds
Subscription count: 0
Steps to Reproduce
- run on terminal A
$ export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
$ ros2 topic pub /talker1234 --qos-durability volatile std_msgs/String "data: Hello World volatile" > /dev/null
- run on terminal B
$ ros2 daemon stop
$ export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
$ ros2 topic info -v /talker1234
System information
- Fast-RTPS version: 3dcd9ab13c5f7158a8ee460a55ef37d229d5ba08
- OS: Ubuntu 20.04
- Network interfaces: eth0 (192.168.0.61), lo (127.0.0.1)
- ROS2: Foxy
Additional resources
- Wireshark capture
package data from CycloneDDS(vendor: 1.16) without
PID_DURABILITYandPID_PARTICIPANT_GUID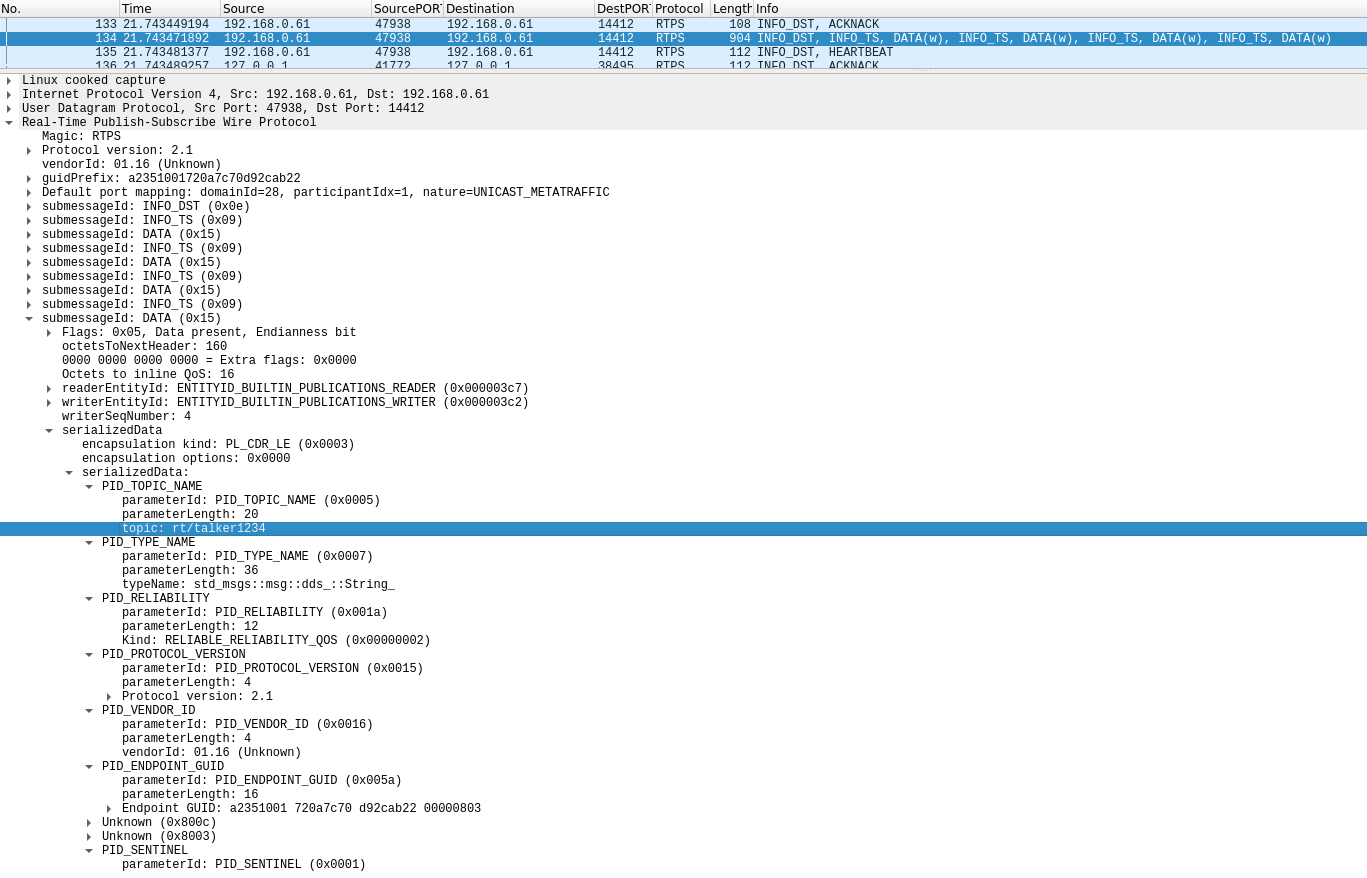
About this issue
- Original URL
- State: closed
- Created 4 years ago
- Comments: 22 (22 by maintainers)
@MiguelCompany
Thank you. After applying https://github.com/eProsima/Fast-DDS/pull/1384 on the latest branch (2.0.x with c1c29b2a5d4d40446603fd19a235012d56a47aa0), I confirmed that these issues are fixed.
@iuhilnehc-ynos We are not talking about the better approach, but the one mentioned in the standard. And what the standard says is that
participant_keyis sent usingPID_PARTICIPANT_GUID@fujitatomoya
Besides that, we need to care this https://github.com/eProsima/Fast-DDS/issues/1380#issuecomment-690345951 .
WriterQos
constructor
m_durability.kind = TRANSIENT_LOCAL_DURABILITY_QOS
clean m_durability.clear(); // m_durability will be VOLATILE … m_durability.kind = TRANSIENT_LOCAL_DURABILITY_QOS; // set
TRANSIENT_LOCALagainI didn’t check that much before, so we need to continue to find which object and where sets the m_qos. Actually, I just quickly updated the following source code from
to
And then it’s working.