openpilot: The controls lagging problem in Carla Simulation
Describe the bug
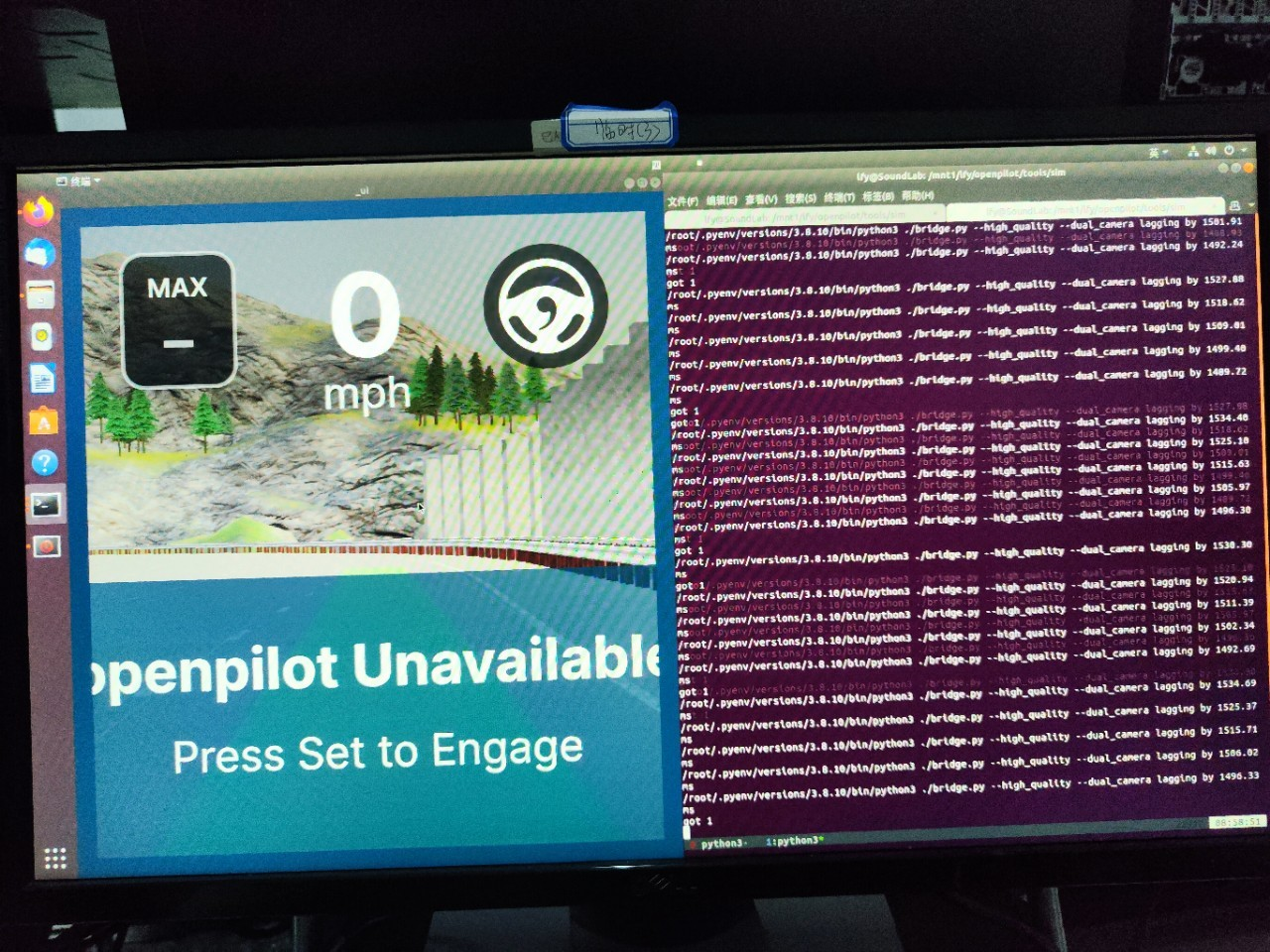
I’m running the latest Openpilot docker on Carla simulation. After input
# Terminal 1
./start_carla.sh
# Terminal 2 - Run openpilot and bridge in one Docker:
./start_openpilot_docker.sh
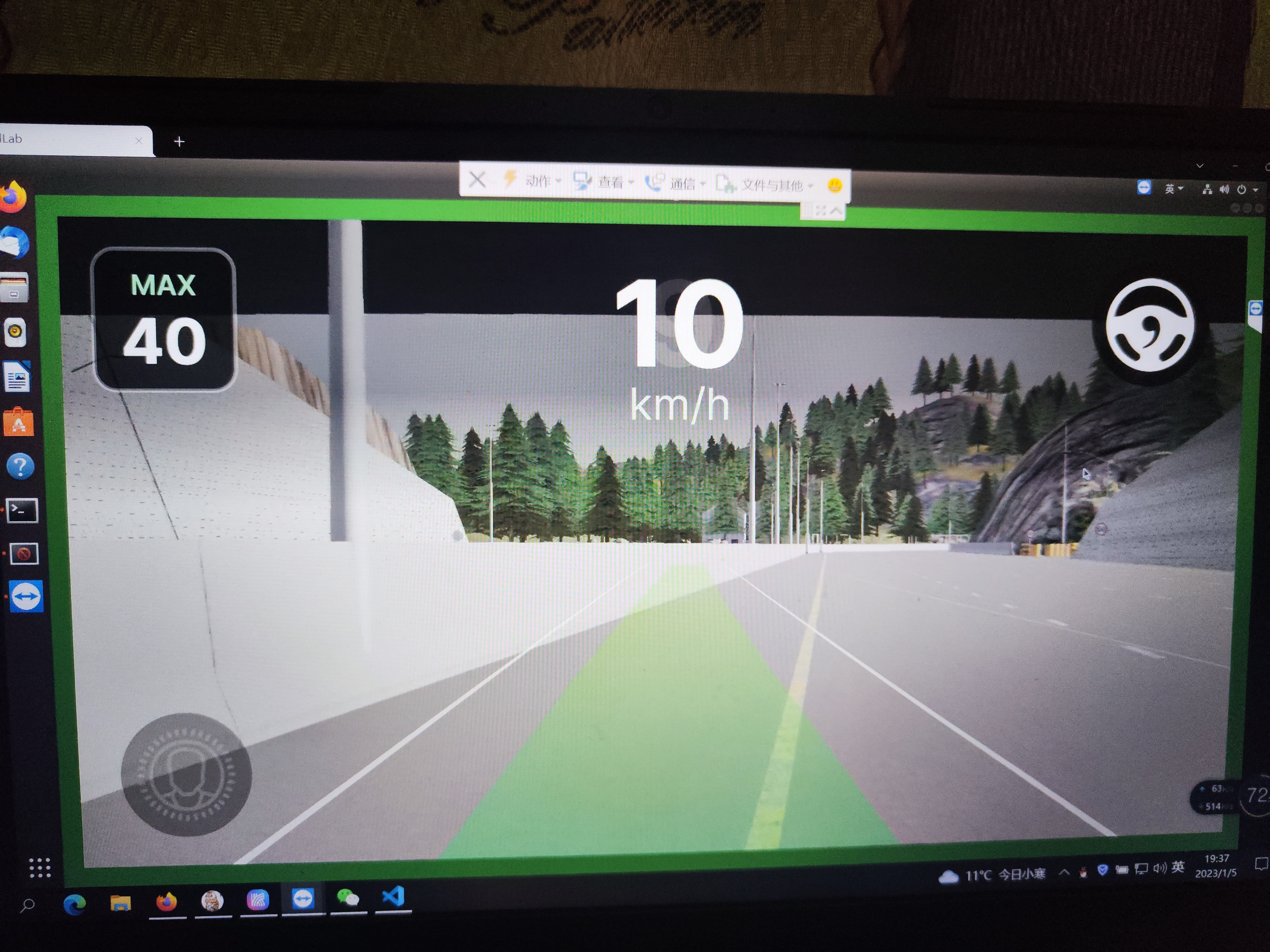
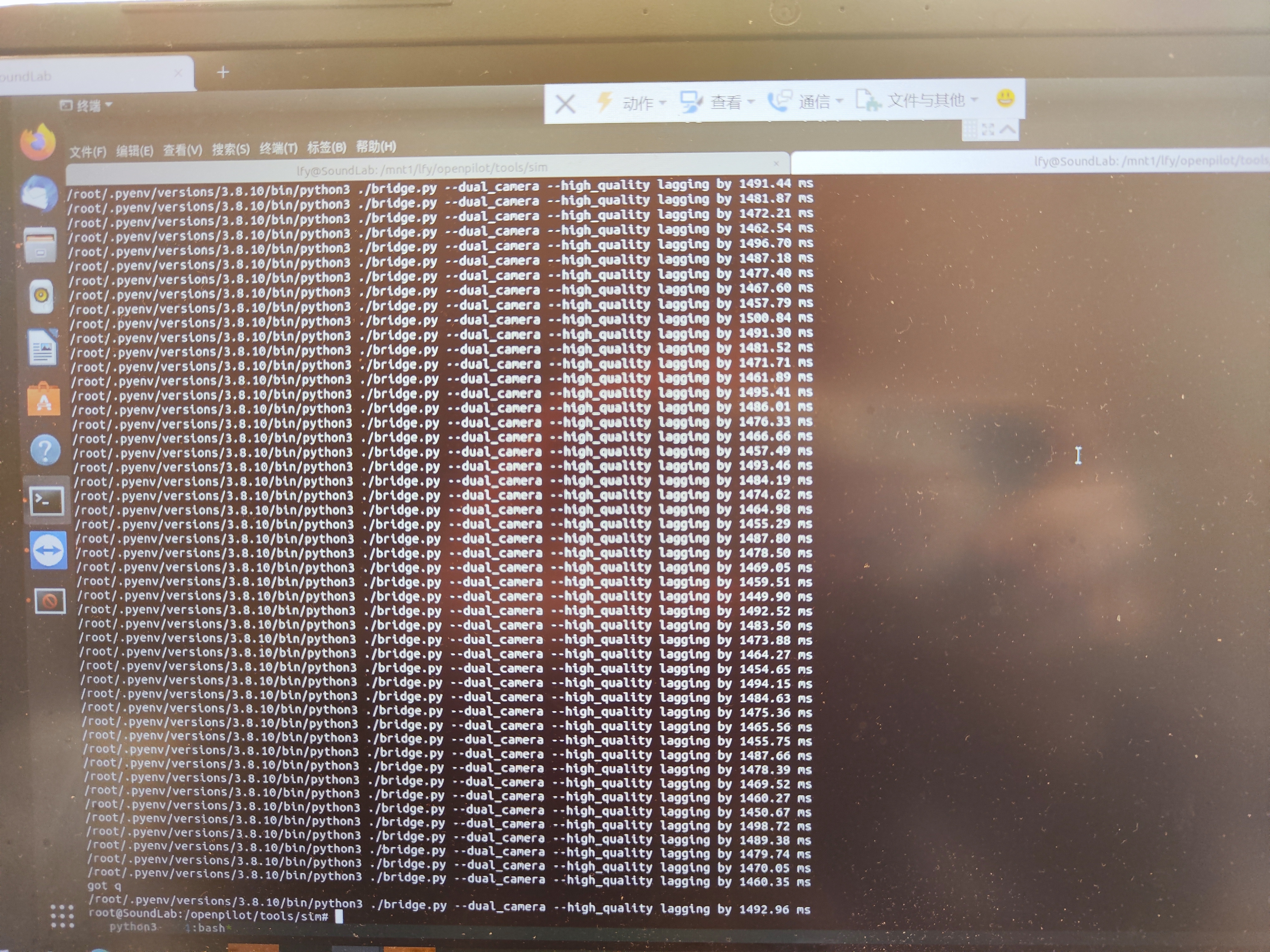
and input ./bridge.py --high_quality --dual_camera in the openpilot docker,the car cannot accelerate and keep driving in the lane after I input ‘1’.
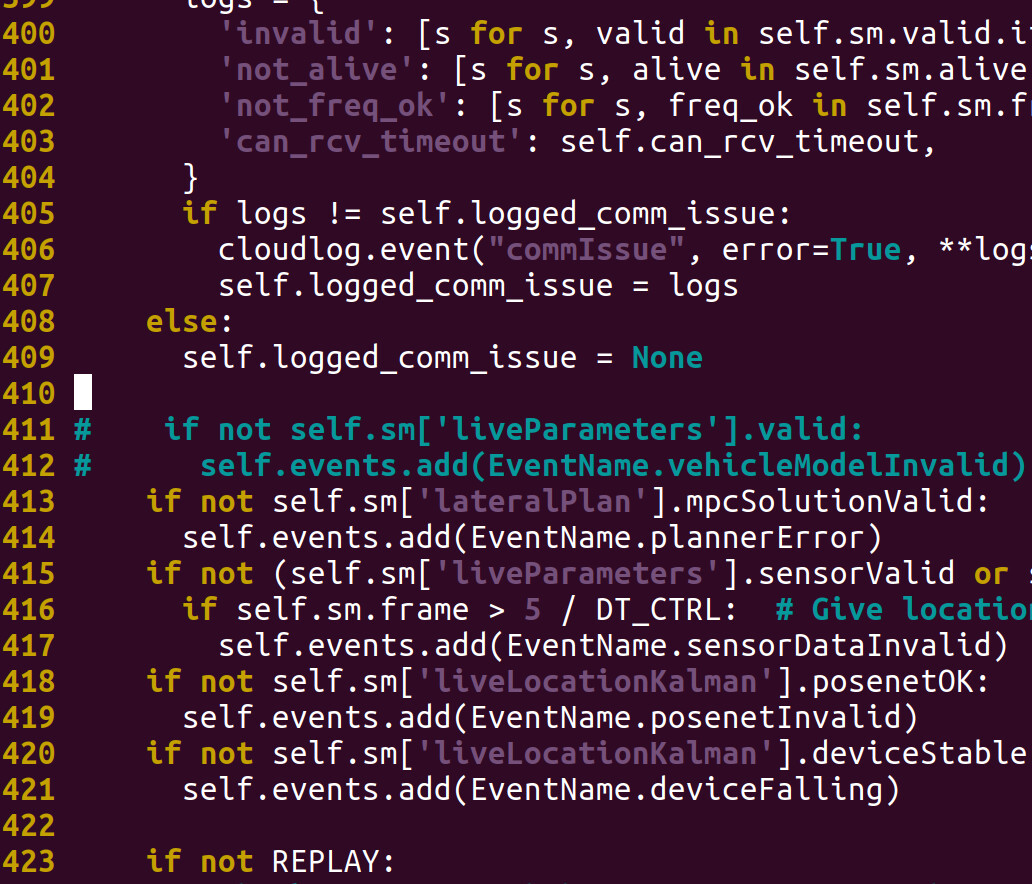
 After that I modify the code in selfdrive/controls/controlsd.py like this
After that I modify the code in selfdrive/controls/controlsd.py like this

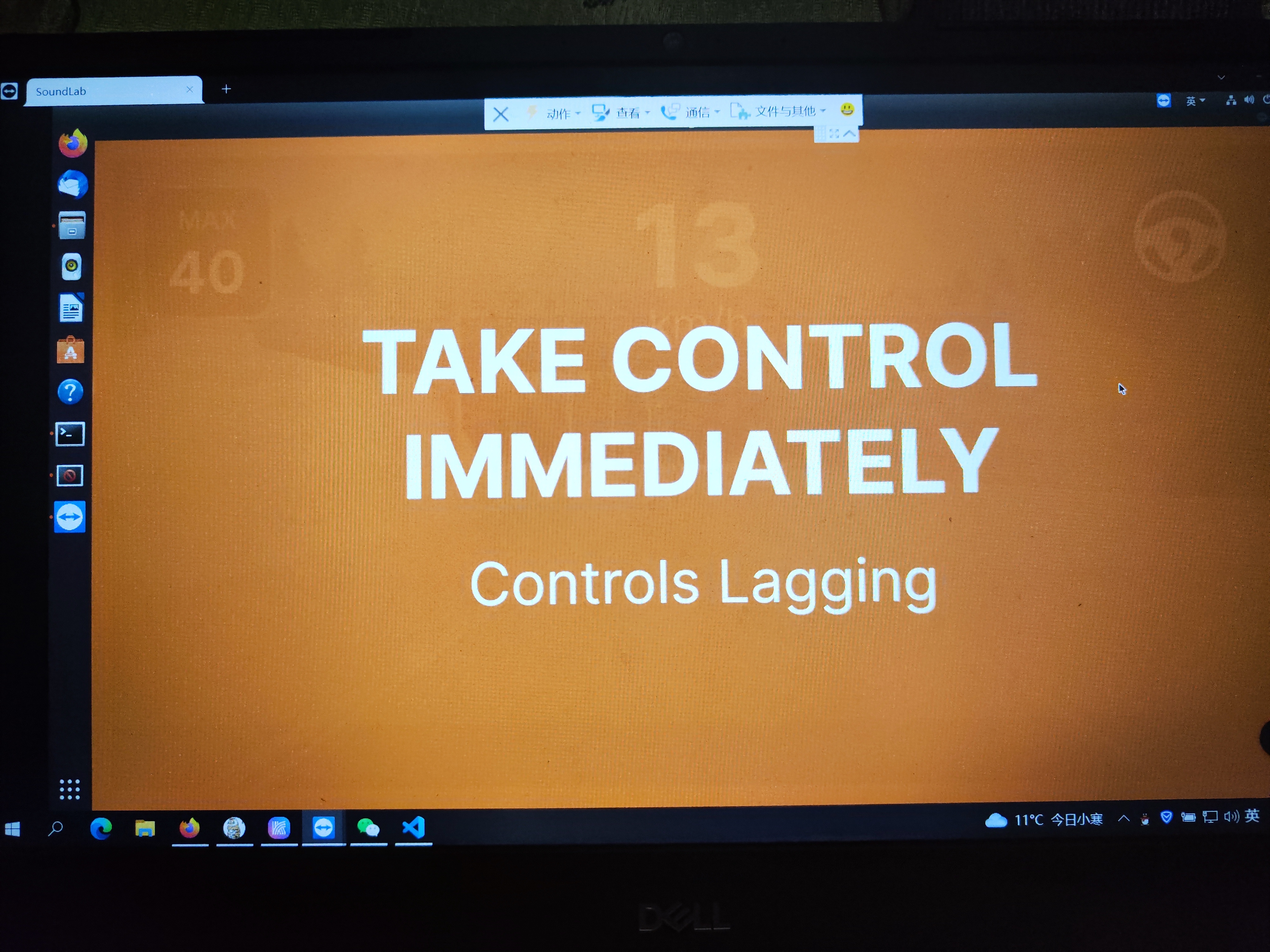
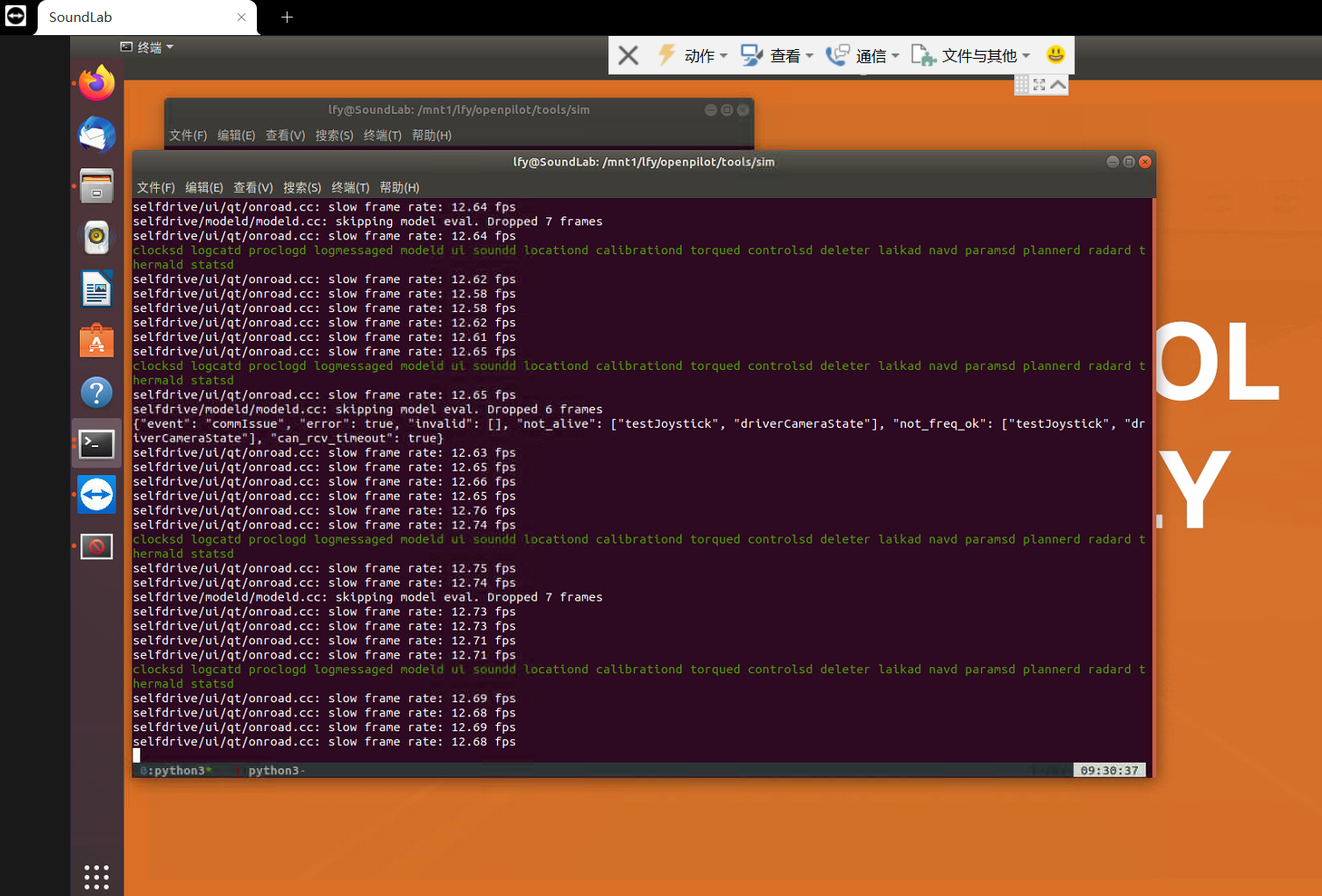
Although the car can accelerate now, it performs badly and slowly,unable to maintain lane driving and show the Controls Lagging problem,It seems that this problem existed before I modified the code.Has anyone met this problem and successfully solved it?Thanks a lot!
OS Version
Ubuntu 20.04(docker)
openpilot version or commit
No response
Additional info
No response
About this issue
- Original URL
- State: closed
- Created a year ago
- Reactions: 1
- Comments: 20
I resolved this problem after I changed my pc,I think it‘s Gpu server configuration issues and I recommend using op on personal computer.Anyway, thanks all those who replyed.You can use the docker from:(https://hub.docker.com/r/ferryman0723/openpilot) now it can work.
It seems to have the same problem after running without --high_quality,still lagging problem.I use Intel® Xeon® Silver 4214 CPU + 2080TI,is this configuration enough to run op?thanks