frigate: [Support]: Events triggering outside required zones
Describe the problem you are having
I have been fighting with one camera for a while now, it mostly works great but I keep getting random events when I have a lot of motion, be it wind, rain (under IR), lighting changes, and especially when my main house lights dim at night when an automation runs. The lighting change creates large amounts of motion, and the resulting chance for a false positive goes up and I get a couple events per week during this time. Attached are a couple photos from my camera during these events.
This was one triggered during a rainstorm at night. This is typical of what I see most of, be it rain or wind.

This one was me driving my golf cart through the zone, and it rightly picked up the motion, but ended up triggering on a house across the street.
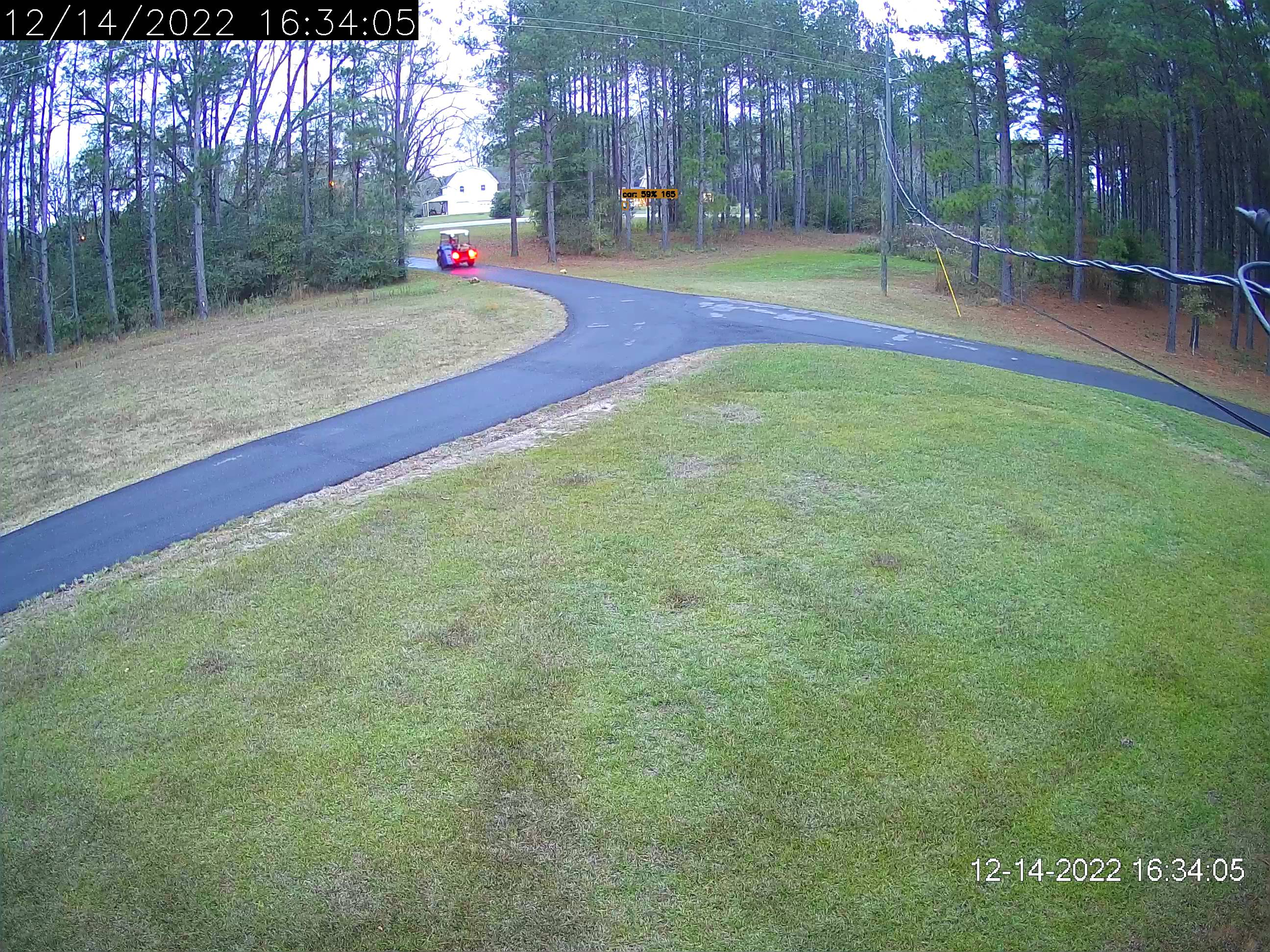
In this one, the actual motion event of a vehicle driving down my driveway triggered via a car on the road (outside the motion zone, and inside the motion mask).

This one, again outside the required zone, and inside the motion mask, triggered when a person was being tracked, but a car presumably drove through the “person” bounding box, and triggered a car event.

These two are a similar event. A vehicle drove into the required zone, and its bounding box captured a car on the road.


This is one that happened when the camera switched on its IR:

I feel like this is a simple thing, maybe to do with masking, but I have been playing with everything I can find in the docs and been unable to reduce the false positives. I also have a decent amount of false negatives, which is why the default min_score and thresholds are changed. That being said, I have been getting these types of false positives since long before I changed those values.
One more thing, I do not have a sub-stream that is usable from this camera for detection. The camera is an Amcrest 5MP bullet, and has a very very low (unusable) resolution sub-stream. Since I am running in a VM, the CPU detectors actually work well enough for me, without getting into trying to pass a USB Coral to the VM. Inference speeds are in the low 40’s at all times.
Version
0.11.1-2EADA21
Frigate config file
mqtt:
host: redacted
user: redacted
password: redacted
cameras:
Front-Yard:
ffmpeg:
inputs:
- path: rtsp://redacted:redacted@redacted/cam/realmonitor?channel=1&subtype=0&unicast=true&proto=Onvif
roles:
- rtmp
- detect
- record
detect:
width: 2592
height: 1944
fps: 3
snapshots:
required_zones:
- motion_area
enabled: true
timestamp: true
bounding_box: true
retain:
default: 180
record:
enabled: true
retain:
days: 1
mode: motion
events:
required_zones:
- motion_area
retain:
default: 30
objects:
track:
- person
- car
- bus
filters:
car:
min_score: 0.5
threshold: 0.57
motion:
mask:
- 814,614,1487,503,1931,545,2592,710,2592,0,0,0,0,825
zones:
motion_area:
coordinates: 1487,503,1931,545,2592,710,2592,1944,0,1944,0,859,0,599
objects:
- person
- car
- bus
detectors:
cpu1:
type: cpu
cpu2:
type: cpu
cpu3:
type: cpu
cpu4:
type: cpu
cpu5:
type: cpu
cpu6:
type: cpu
cpu7:
type: cpu
cpu8:
type: cpu
timestamp_style:
# Optional: Position of the timestamp (default: shown below)
# "tl" (top left), "tr" (top right), "bl" (bottom left), "br" (bottom right)
position: "tl"
# Optional: Format specifier conform to the Python package "datetime" (default: shown below)
# Additional Examples:
# german: "%d.%m.%Y %H:%M:%S"
format: "%m/%d/%Y %H:%M:%S"
# Optional: Color of font
color:
# All Required when color is specified (default: shown below)
red: 255
green: 255
blue: 255
# Optional: Line thickness of font (default: shown below)
thickness: 2
# Optional: Effect of lettering (default: shown below)
# None (No effect),
# "solid" (solid background in inverse color of font)
# "shadow" (shadow for font)
effect: solid
ffmpeg:
hwaccel_args:
- -hwaccel
- qsv
- -qsv_device
- /dev/dri/renderD128
Relevant log output
N/A
FFprobe output from your camera
ffprobe version 5.1.2-essentials_build-www.gyan.dev Copyright (c) 2007-2022 the FFmpeg developers
built with gcc 12.1.0 (Rev2, Built by MSYS2 project)
configuration: --enable-gpl --enable-version3 --enable-static --disable-w32threads --disable-autodetect --enable-fontconfig --enable-iconv --enable-gnutls --enable-libxml2 --enable-gmp --enable-lzma --enable-zlib --enable-libsrt --enable-libssh --enable-libzmq --enable-avisynth --enable-sdl2 --enable-libwebp --enable-libx264 --enable-libx265 --enable-libxvid --enable-libaom --enable-libopenjpeg --enable-libvpx --enable-libass --enable-libfreetype --enable-libfribidi --enable-libvidstab --enable-libvmaf --enable-libzimg --enable-amf --enable-cuda-llvm --enable-cuvid --enable-ffnvcodec --enable-nvdec --enable-nvenc --enable-d3d11va --enable-dxva2 --enable-libmfx --enable-libgme --enable-libopenmpt --enable-libopencore-amrwb --enable-libmp3lame --enable-libtheora --enable-libvo-amrwbenc --enable-libgsm --enable-libopencore-amrnb --enable-libopus --enable-libspeex --enable-libvorbis --enable-librubberband
libavutil 57. 28.100 / 57. 28.100
libavcodec 59. 37.100 / 59. 37.100
libavformat 59. 27.100 / 59. 27.100
libavdevice 59. 7.100 / 59. 7.100
libavfilter 8. 44.100 / 8. 44.100
libswscale 6. 7.100 / 6. 7.100
libswresample 4. 7.100 / 4. 7.100
libpostproc 56. 6.100 / 56. 6.100
Input #0, rtsp, from 'rtsp://redacted@redacted:554':
Metadata:
title : Media Server
Duration: N/A, start: 0.200000, bitrate: N/A
Stream #0:0: Video: h264 (Main), yuv420p(progressive), 2592x1944, 10 fps, 10 tbr, 90k tbn
Frigate stats
No response
Operating system
HassOS
Install method
HassOS Addon
Coral version
CPU (no coral)
Network connection
Wired
Camera make and model
Amcrest IP5M-B1186EW-28MM
Any other information that may be helpful
No response
About this issue
- Original URL
- State: closed
- Created 2 years ago
- Comments: 29 (3 by maintainers)
Thank you. I had it completely backwards. I’ll try that setup now.